ROTO
DRL Phase 2 - 2013-14
Living in a world where more than half of the global population resides in urban environments, it is becoming more apparent that city infrastructure is under stress. One of the most pressing issues in this regard is transportation and urban mobility. Therefore, we are proposing a shared, single occupancy, autonomous vehicle that is driven by a computational system based on by real-time data from the city. These intelligent vehicles have the ability to communicate with each other in order to perform tasks such as collective motion and energy sharing. When not in use, the vehicles have the potential to become tools to create novel infrastructure through a process of self-assembly.
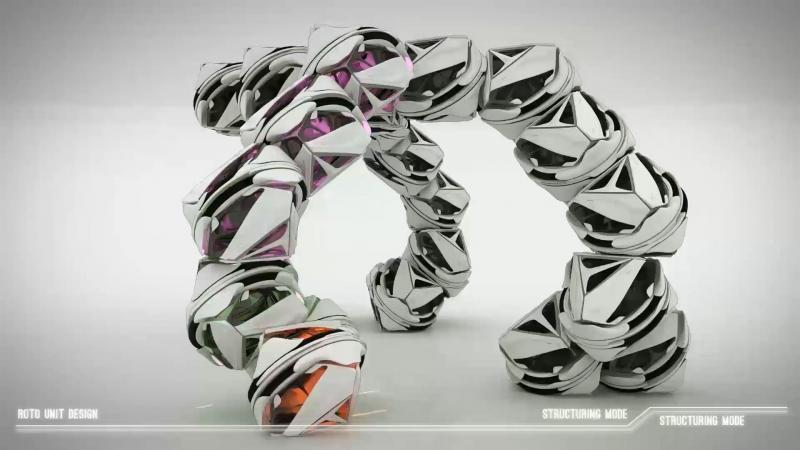
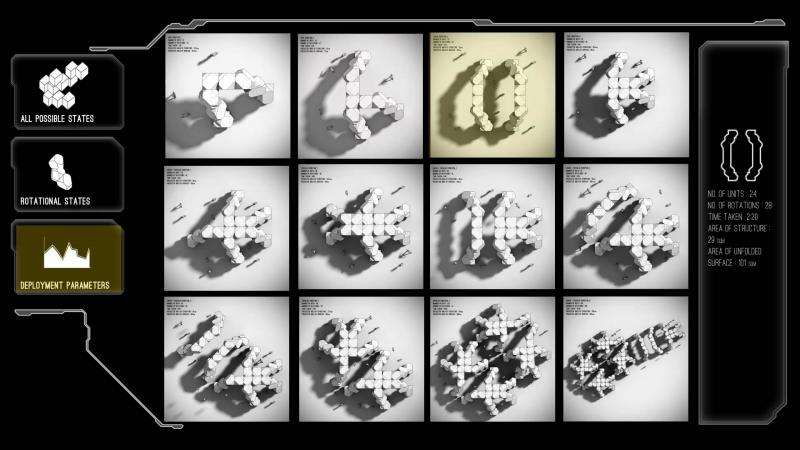
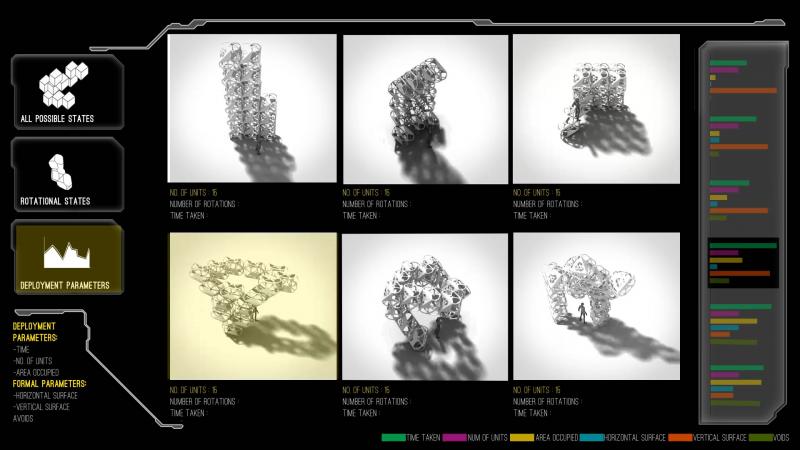
Through initial research into a global awareness computational platform based on networked relationships of data from the city, we developed a distribution, routing and deployment algorithm. Establishing the physicality of the unit involved an investigation into motion through building extensive prototypes. Aspects of collective motion, self-assembly and communication between vehicles are demonstrated through robotic prototypes that play out different scenarios.
The single occupancy unit performs collectively to respond to needs of mobility while also creating transient structures with solar collection capacity. Employing such a self-structuring system in dense urban cities can reduce pressure on space by getting rid of surface parking through parking vertically on streets. Spaces can be rapidly deployed as per user needs as infill against the backdrop of permanent infrastructure within the city. We envisage that through the use of such an autonomous system, the landscape of cities could be dramatically transformed.
Streets, curbs and other surface elements can merge into one.
Project Name:
Urban E-motion
Studio:
Theodore Spyropoulos
Team Name:
ROTO
Team members:
Natasha Gill (India), Octavian Gheorghlu (Romania), Sergey Krupin (Russia), Nhan Vo (United States)

DRL Phase 2 - 2013-14

DRL Phase 2 - 2013-14
DRL Phase 2 - 2013-14
DRL Phase 2 - 2013-14
DRL Phase 2 - 2013-14
DRL Phase 2 - 2013-14