Programmable Architecture: Towards intelligent architecture
Supervisors: George Jeronimidis, Michael Weinstock
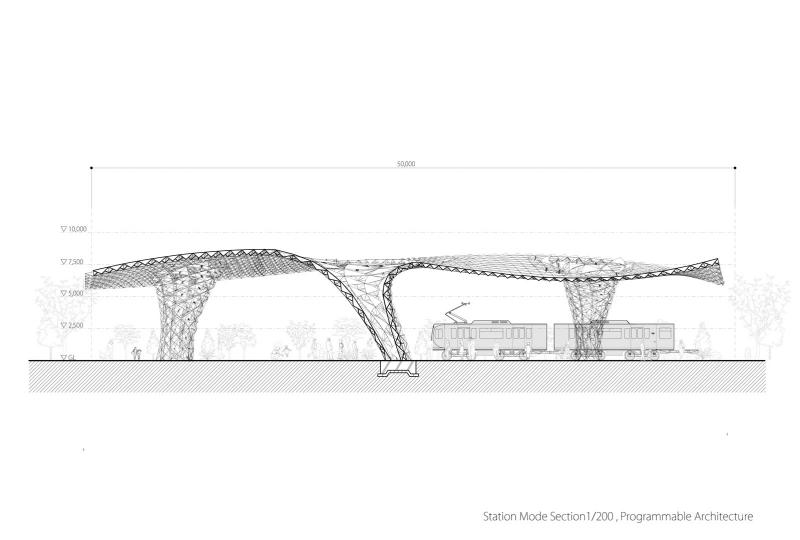
This project introduces a new strategy for robotic architecture as an intelligent system, consisting of both autonomous and subservient schemes that maintain a constant homeostasis within its contained environment. Information flow between Genetic Algorithms (GA) and user input prompt this hybrid system to output the consequent, ever-changing physical form. The hardware is an accumulation of self-sufficient machines dedicated to the actions of sensing-calculating-actuating. Each makes its own simple decisions, which collectively turn into a larger problem-solving machine that simultaneously takes central orders into account. As a case study a machine organized using tensegrity-based components of variable forms was proposed. A physical model of this machine has been built and tested via the electrically controlled and wirelessly connected microcomputer chip Arduino. PhD completed 2014.
Kensuke Hotta studied architecture at Kyoto and Tokyo University, Japan and at the Bartlett School, London and is currently a Chief Executive Officer at Shari Design.He has received a scholarship from Union Foundation and has won numerous prizes at international competitions. He regularly lectures at various private and public events. His favourite food is a queen crab.